El movimiento de las máquinas ya no se considera rígido ni se limita a gestos incómodos. este robot Sus movimientos se han vuelto cada vez más sencillos y ahora se mueven cada vez más como humanos, aunque todavía están lejos del nivel de los grandes deportistas.
La diferencia es evidente en la velocidad de reacción, la precisión bajo presión y la capacidad de predecir jugadas complejas. Aun así, las mejoras en la forma de movernos han cambiado el punto de partida Aplicación de la robótica en el deporte. Este avance nos obliga a encontrar nuevas formas de enseñarles habilidades que antes no se podían replicar.
Equipo chino propone una forma de enseñar tenis sin datos perfectos
Un sistema desarrollado en China se llama latente Robot humanoide aprende a jugar tenis . Este trabajo fue publicado en arXiv No es necesario tener un historial perfecto.
Devuelve la pelota, golpea la pelota continuamente y muévete. Ese tipo de actitud natural no es común en este campo. Esta mejora se sustenta en una forma diferente de entender el aprendizaje, en la que Errores y fragmentos incompletos. También proporcionan información útil.
El proceso comienza con la recopilación de datos básicos del juego obtenidos de jugadores aficionados. Los investigadores recopilaron aproximadamente cinco horas de clips de trucos simples, como un golpe de derecha, un revés o un desplazamiento lateral. Utilizaron este material para construir un Representa las posibles respuestas del robot.
Este sistema permite ajustar y reorganizar los movimientos para adaptarse a cada situación, en lugar de repetir secuencias cerradas. Esta estructura facilita que el robot aprenda a vincular acciones de forma flexible, en lugar de como una serie de gestos fijos.
La prueba en pista muestra la comunicación en la vida real entre personas
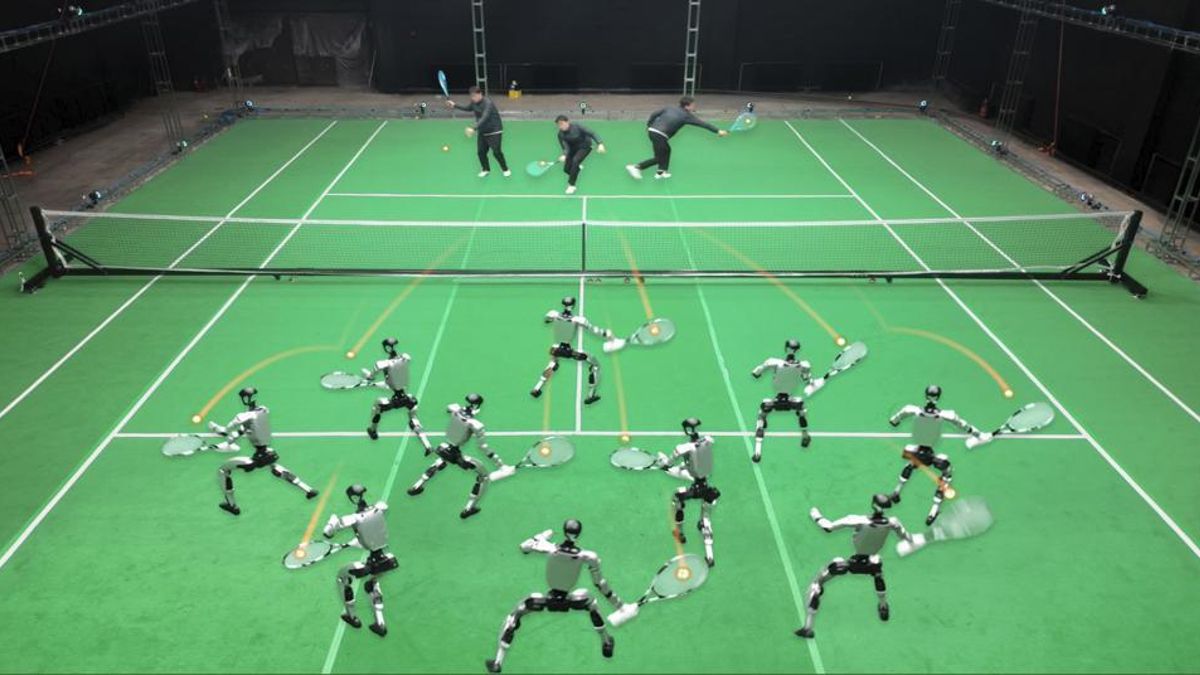
Las pruebas de campo demuestran cómo el aprendizaje se traduce en comportamiento en el mundo real. el robot estaba Capacidad para jugar contra personas y mantener la comunicación. Múltiples disparos en diferentes zonas del campo. Ejecuta golpes de derecha y de revés mientras se adapta tanto a posiciones cercanas a la red como profundas.
Esta capacidad de reaccionar en diferentes posiciones demuestra que el sistema no se limita a un tipo de juego; Gestiona múltiples situaciones en un mismo entrenamiento. En este sentido, la interacción con humanos nos permite evaluar qué tan cercanas son las acciones a los jugadores reales.
usar Este enfoque es diferente. El sistema no se basa en la captura completa y precisa de los movimientos humanos, sino que utiliza fragmentos que contienen movimientos básicos. Realizar encuestas, obtener datos, comprender situaciones ideales y comprender información relevante. habilidades básicas de tenis.
Al reorganizarlas y corregirlas, el robot aprende a reaccionar ante las bolas entrantes en diferentes condiciones y a devolverlas al área objetivo. ese metodo Reducir la dificultad de la recopilación de información. y abre la puerta a la formación donde no existen registros detallados.
Los resultados fueron evaluados a través de 10.000 pruebas para comparar el sistema con métodos anteriores. Mejora la precisión, la tasa de éxito y la naturalidad de tus movimientos. En el mejor de los casos, el La tasa de precisión del robot alcanza el 96,5%que mide la capacidad de devolver el balón a 2,5 metros del objetivo.
Además, el sistema puede mantener batallas continuas con jugadores humanos, algo que antes era difícil de lograr. Esta cifra refleja avances en las capacidades de respuesta, aunque No significa que los robots puedan competir
Los modelos actuales tienen limitaciones en autonomía y toma de decisiones
A pesar de los avances, el sistema aún presenta Lo señalan los propios investigadores. Las operaciones actuales dependen de sistemas de captura de movimiento que operan fuera del laboratorio, lo que reduce su autonomía. También funciona con un modelo de juego simplificado que se centra en devolver bolas generadas aleatoriamente a un punto objetivo.
Esta configuración no replica un partido completo con decisiones tácticas o intercambios verdaderamente competitivos. Los investigadores propusieron, Incorporar una visión activa puede mejorar esta situación y permite una interacción más completa.
La capacitación final está respaldada por aprendizaje por refuerzo y simulación antes de transferir el modelo al robot. . Este proceso permite que el conocimiento aprendido en un entorno controlado se utilice en condiciones del mundo real.
La transferencia se realiza introduciendo ajustes a los cambios en el entorno y la percepción del robot para evitar que dependa de la misma situación que la situación simulada. El resultado es un sistema que puede sostener Su comportamiento se mantiene constante mientras pasa del laboratorio a la pista.aunque todavía necesita mejoras para alcanzar los niveles de juego humanos más exigentes.